معادلات حالت موتور القایی
معادلات حالت موتور القایی
یکی از مسائل مهم در رشته های مهندسی، مدل سازی سیستم ها در فضای حالت می باشد. معادلات ماتریسی فضای حالت را می توان بصورت زیر نشان داد:
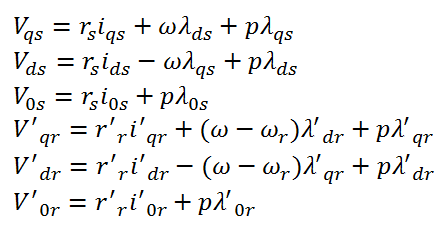
که X ها متغیرهای حالت، Y ها خروجی سیستم و U ها ورودی سیستم می باشد. از این معادلات می توان برای تعیین پایداری سیستم، طراحی کنترل کننده، مشاهدهگر (Observer) و… استفاده کرد. در این قسمت با جایگذاری راکتانس X و شار دور بر ثانیه ψ بجای اندوکتانس L و شار دور λ در معادلات بدست آمده برای موتور، معادلات حالت موتور القایی را بدست می آوریم. همان طور که اثبات شد معادلات ولتاژ موتور القایی در قاب گردان dq بصورت زیر بدست آمد:
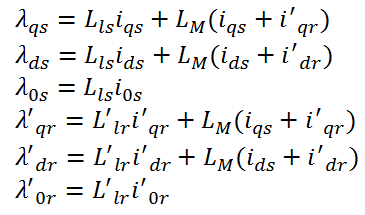
که مقادیر شار نشتی بصورت زیر محاسبه شد:
می توان با جایگذاری معادلات زیر، معادلات بالا را بر حسب راکتانس و شار دور بر ثانیه بدست آورد:
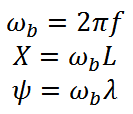
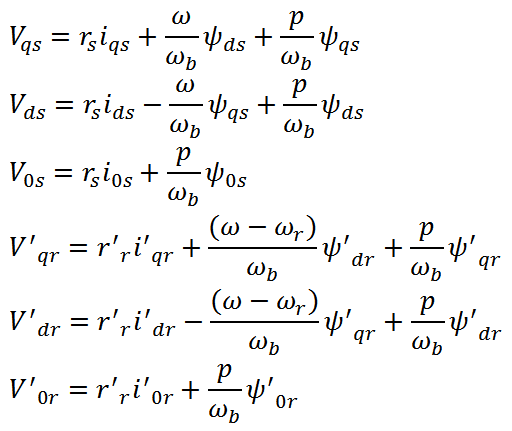
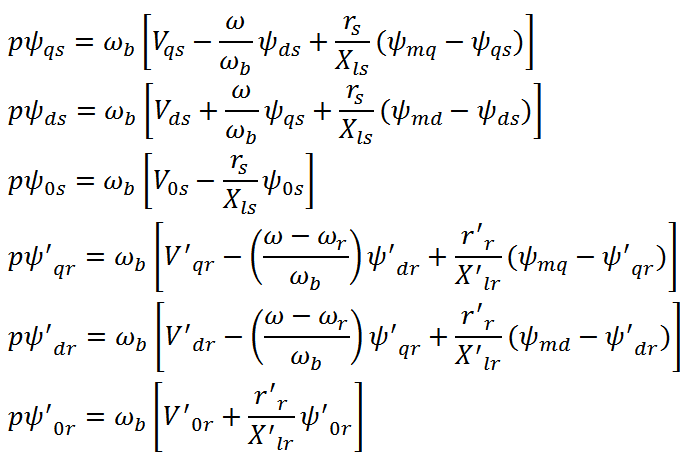
که ωb سرعت زاویه ای الکتریکی پایه بر حسب فرکانس نامی موتور می باشد. معادلات جدید ولتاژ بر حسب راکتانس و شاردور بر ثانیه بصورت زیر تبدیل می شوند:
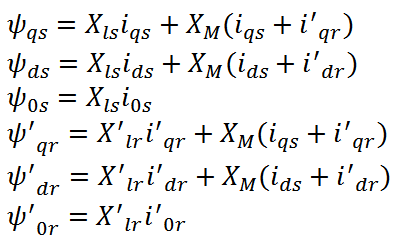
روابط شار نشتی ها نیز بر حسب شار دور بر ثانیه نیز بصورت زیر تبدیل می شود:
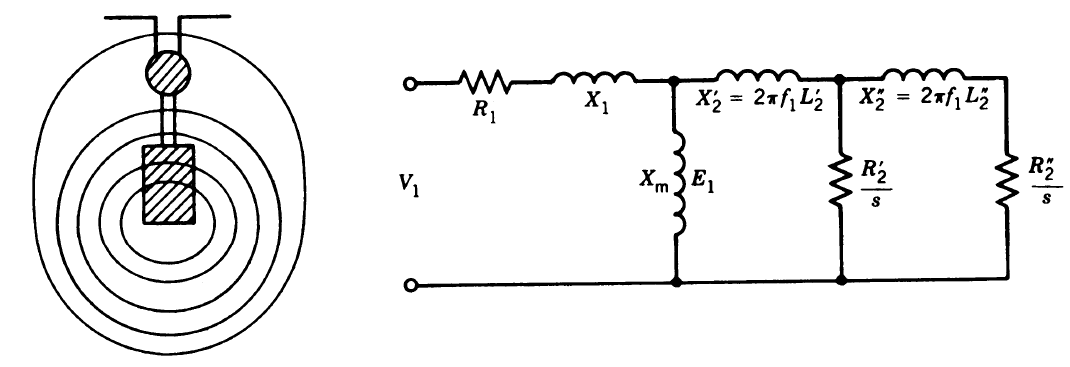
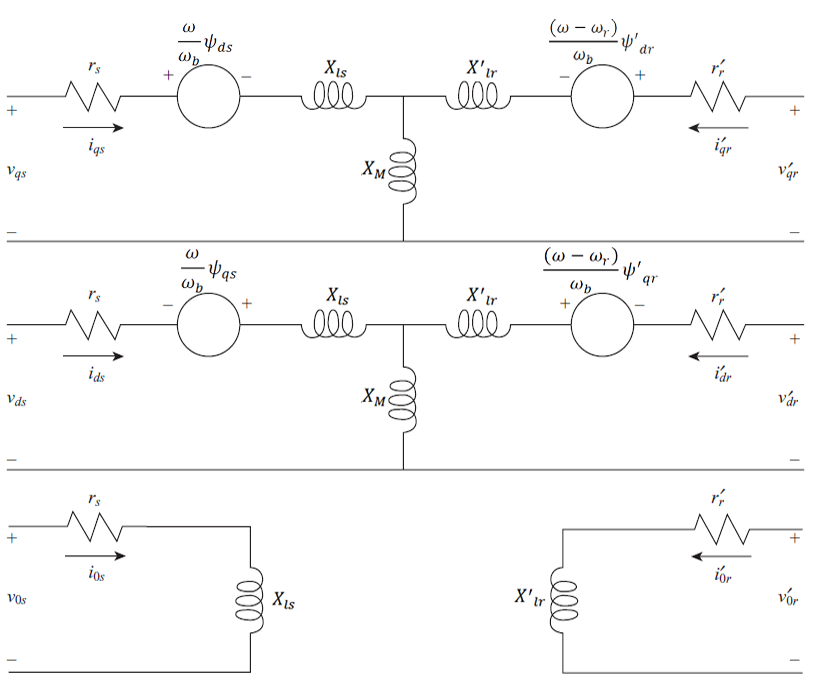
مدار معادل موتور القایی برحسب راکتانس و شاردور بر ثانیه در قاب مرجع dq بصورت زیر می باشد:
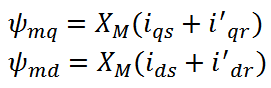
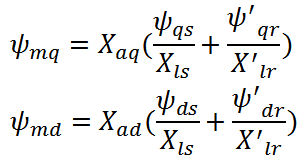
شار دور مغناطیسی محورهای d و q بصورت زیر تعریف می شوند:
حال با جایگذاری این روابط، جریان ها را بر حسب شار دور بر ثانیه ها بدست می آوریم:

جریان های بدست آمده را در معادلات ولتاژ قرار داده و معادلات را بفرم زیر ساده می کنیم:
همان طور که مشخص است روابط بصورت معادلات فضای حالت تبدیل شده است. توجه کنید که معادلات حالت بالا خطی نمی باشند زیرا ضریب ωr با زمان تغییر می کند. شار دور مغناطیسی محورهای d و q را نیز می توان بصورت زیر نوشت:
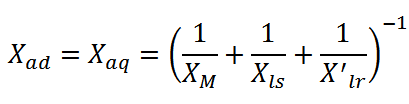
که Xad و Xaq بصورت زیر تعریف می شود:
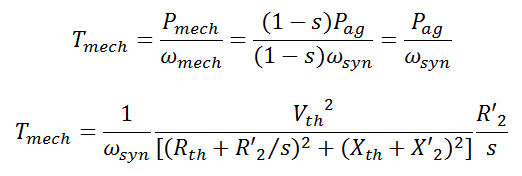
گشتاور الکتریکی موتور را می توان بصورت زیر محاسبه کرد:

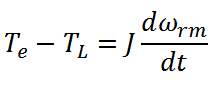
وجود ضریب ۳/۲ بخاطر همسان سازی توان در دستگاه dq می باشد و P نیز تعداد قطب های موتور می باشد. تا اینجا معادلات حالت الکتریکی را بدست آوردیم. یک معادله مکانیکی نیز برای محاسبه سرعت روتور باید نوشت. بدین منظور از قانون نیوتن برای جسم دوار استفاده می کنیم. برای حالت موتوری می توان نوشت:
توجه کنید که ωrm سرعت مکانیکی روتور می باشد پس می توان معادله بالا را برحسب پریونیت سرعت بصورت زیر نوشت:
ثابت اینرسی H موتور بصورت زیر تعریف می شود:
پس معادله حرکت بصورت زیر تبدیل می شود:
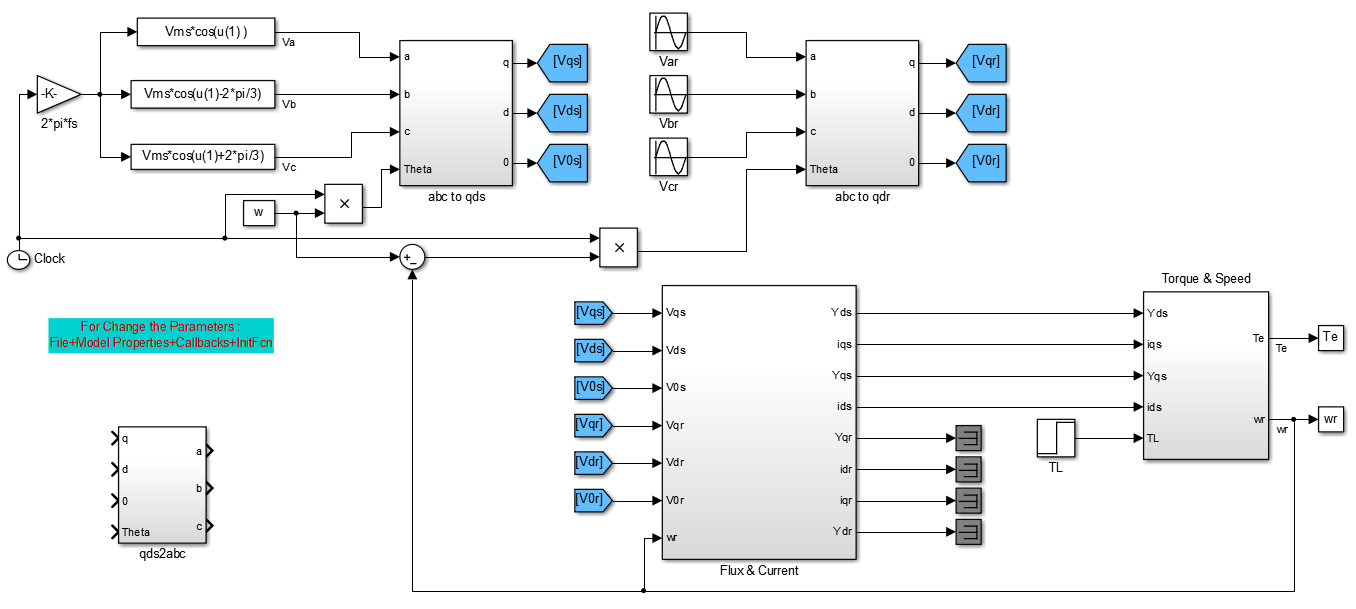
بلوک شبیه سازی شده با Matlab بصورت زیر می باشد: